| Главная » Статьи » Станки CNC » Электроника |
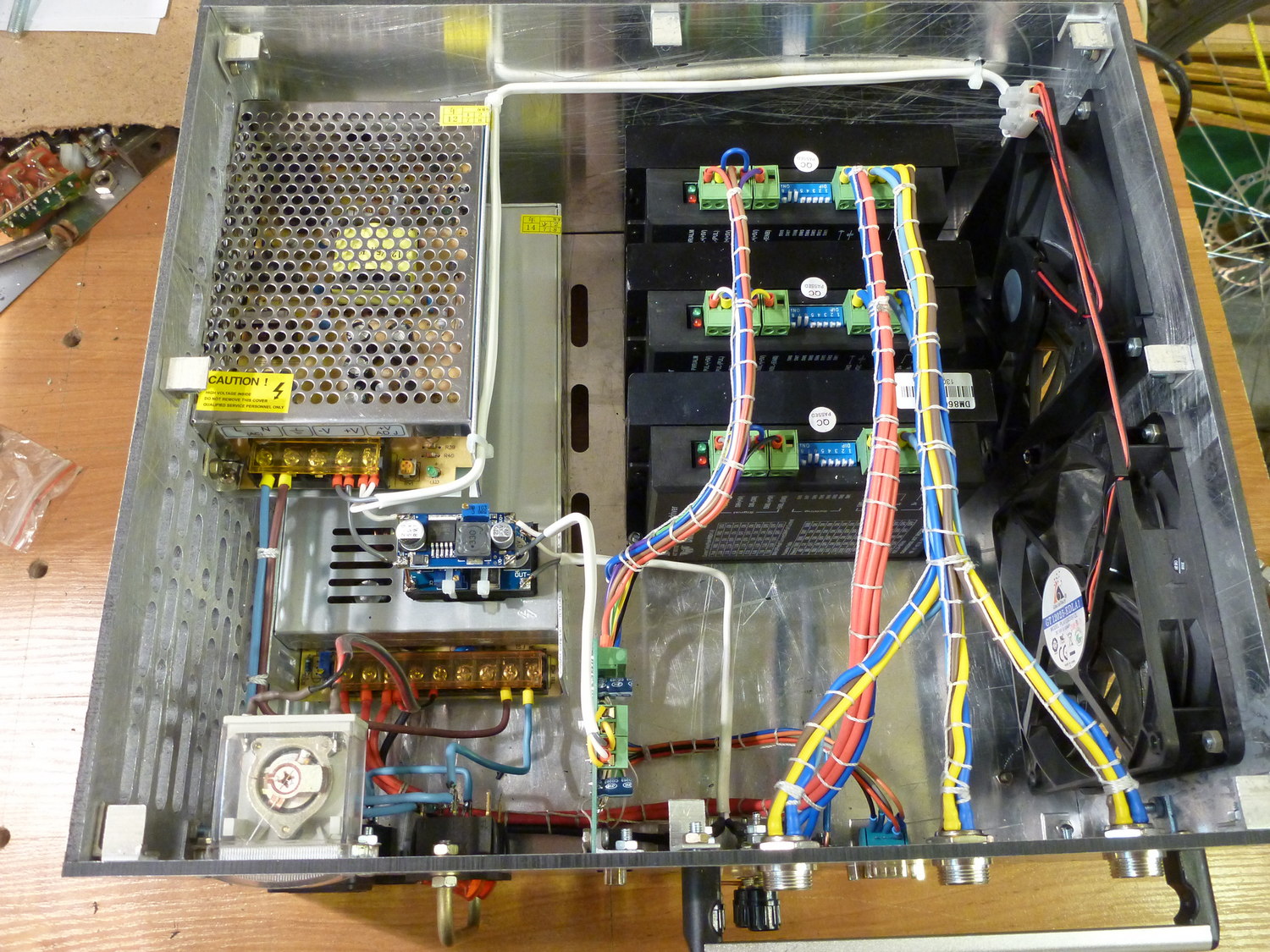
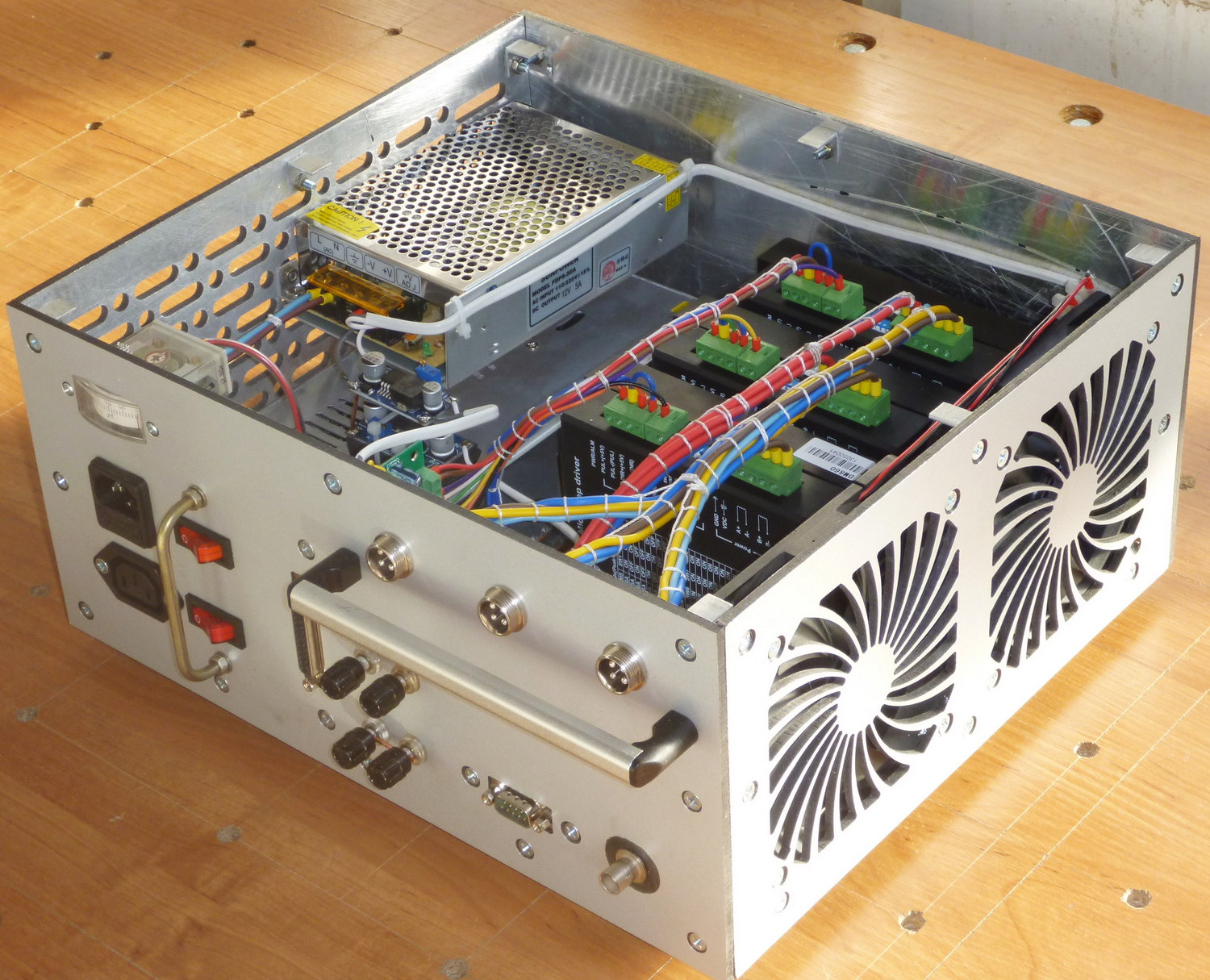
В состав блока входят:
Драйвер DM860 - один из дешевых популярных драйверов для управления мощными двигателями.
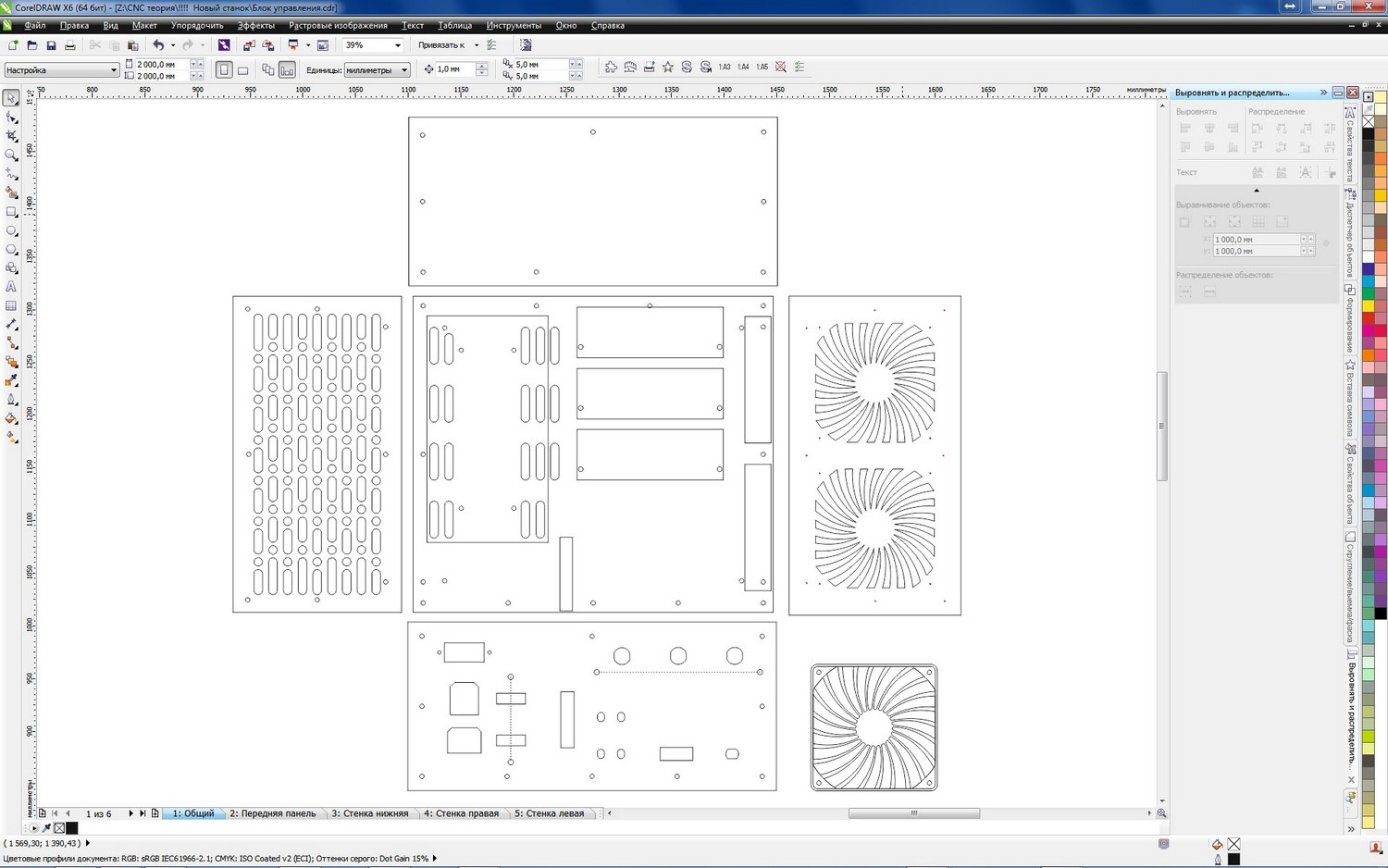
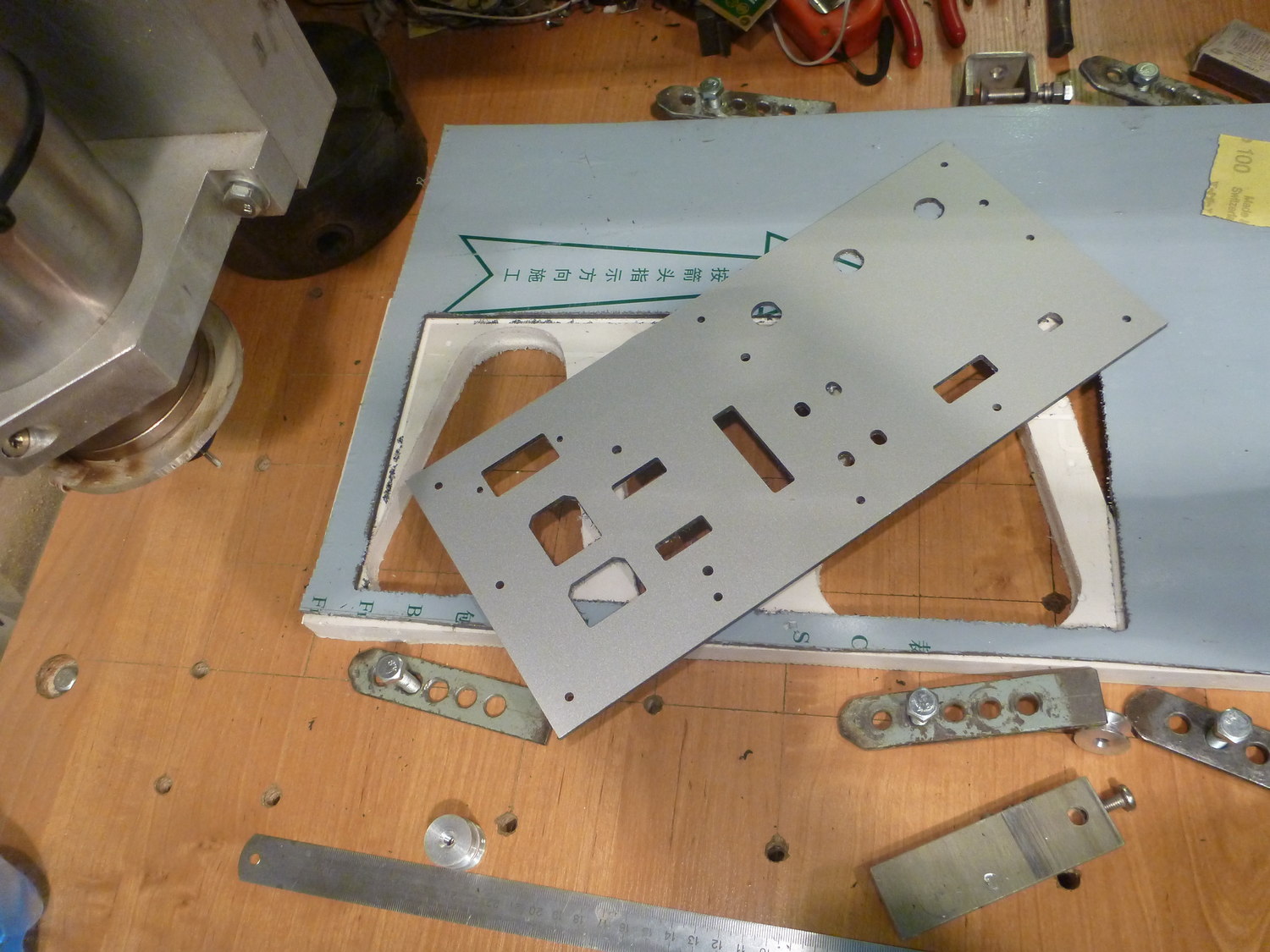
Как показала практика, на высокой скорости перемещения по оси Y возникал резонанс, который приводил к заклиниванию двигателя. Для проверки двигатель был подключен к оригинальному драйверу Geckodrive G210X. Резонанс значительно уменьшился, заклинивания двигателя не наблюдалось. Оба драйвера (сначала DM860, потом G210X) были включены в микрошаг 1/10. Сразу скажу, что осцилографом форму сигнала не смотрел. Подключил обратно DM880 и ограничил максимальную скорость перемещения в 5000 мм/мин. Больше, в принципе, и не нужно. При весе портала около 60 кг значительные ускорения и скорость перемещения негативно влияют на износ ШВП и подшипниковых опор. Если бы стояли японские NSK я бы так не переживал, но так, как стоят ШВП из Китая произведенные фирмой с таким названием, что я боюсь его даже произносить, то лучше ограничить скорость и ускорение. Для расчета оптимального напряжения питания драйверов есть эмпирически найденная формула (упоминается в инструкции Geckodrive, а этим ребятам можно верить). Напряжение питания = 32 * (квадратный корень из индуктивности обмотки в mH). Для моего случая V = 32 * (SQRT(6,5)) = 81,5. Многовато. От напряжения питания зависят динамические характеристики двигателя. Я так догадываюсь, что при более высоком значении напряжения питания идет более высокая скорость нарастания напряжения на выходных транзисторах драйвера в момент их открытия, что и обеспечивает более высокие ускорения двигателя без "заклинивания" ротора (может это и не так, не настаиваю). По цене и распространенности БП на 48V опережает БП на 60V. Поэтому купил на 48V. Основной блок питания на 48V 350W для питания драйверов. Блок питания выдает 7А, чего вполне достаточно. На многих форумах и сайтах читал, что люди для драйвера с выходным током в 7А ставят блок питания на 7А, а то и больше, с запасом!!!. Зачем? Говорят чтобы блок питания потянул по току. А то, что драйвер является по сути импульсным преобразователем (очень грубо) не учитывают. Пример. У меня двигатели WT86STH118-6004A, NEMA34, ток 5.6A/phase. По данным производителя напряжение, при котором ток в обмотке достигает номинального значения равно 3,6V. Имеем 2 обмотки по 5,6А при напряжении 3,6V. Один двигатель потребляет 2*5,6*3,6=40,32W. Драйвер питается напряжением 48V. Если не считать потерь на преобразование, то драйвер потребляет 40W/48V=0,8A! Три двигателя потребляют через драйверы 2,4А от блока питания. Предположим, что на преобразовании теряется еще 2,4А (на самом деле это значение намного меньше), то получим 4,8 А. Для блока питания, рассчитанного на 7А, выдать 4,8А не проблема. Теперь учтем, что максимальный ток сразу в двух обмотках бывает только в середине шага, когда для удержания ротора между шагами ток подается одновременно на обе обмотки. Для микрошага 1/10 это 1/5 времени каждого шага, то есть при вращении это пики потребления около 20% времени. Также можно учесть, что при остановке двигателя в середине шага максимальный ток будет потребляться всего 0,2 секунды, потом драйвер ограничит ток до 40%, так называемый ток удержания (для ограничения нагрева остановленного двигателя). Максимальное потребление тока будет только при условии одновременной остановке всех трех двигателей в полушаге. Домашнее задание: посчитайте вероятность возникновения такого события. За все время работы станка вентилятор на блоке питания ни разу не включался. Он включается автоматически при нагреве до определенной температуры. Думал, что он не рабочий, подкинул к БП керамический резистор для увеличения нагрузки и через пол минуты он заработал. Для тех, у кого скорости останова и перемещения очень большие настоятельно рекомендую ставить так называемый дампер. Дампер предназначен для защиты драйверов ШД и источников питания от обратной ЭДС создаваемой ШД при резких торможениях/ускорениях. Дампер можно сделать самостоятельно, он очень прост и состоит из 5-8 деталей (гуглите CNC Dumper). ЭДС через защитные диоды драйвера попадает на выводы питания драйвера. При очень резком замедлении может создаться ЭДС по величине выше напряжения питания драйвера. Давным давно это событие с большой вероятностью приводило к выходу из строя драйвера. Сейчас практически все современные драйверы имеют защиту от перенапряжения питания. Так как у меня драйверы могут питаться напряжением 80V, что довольно много (есть только небольшой сегмент драйверов с более высоким напряжением питания) и скорости ускорения/замедления не очень большие, то я дамперы не использовал. В работе, при торможении одного двигателя, напряжение ЭДС "попадаемое" в линию питания потребляется двумя другими драйверами. Некий режим рекуперации энергии. Все практические эксперименты по работе на максимально возможных скоростях прошли без выхода из строя каких либо компонентов блока управления. Вспомогательный блок питания на 12V 60W. От него питаются вентиляторы охлаждения (2 по 3W) и 2 преобразователя напряжения. Один на 28V для питания светодиодной подсветки (8W) рабочего инструмента. Второй на 5V для питания платы интерфейсов с двумя реле (еще до 1W). БП поставил тот, который был в наличии, его мощность избыточна. Уже приобрел 20W БП, заменить никак руки не доходят. Плата опторазвязки интерфейсов (breakout board) шла в подарок к двигателям. Спасибо Китайцам. Корпус был нарисован в программе CorelDraw и вырезан из алюкобонда. Верхняя крышка из 4мм оргстекла с гравировкой. На передней панели есть 2 разъема для питания. Один для подключения блока к сети 220V. Другой для подключения к блоку потребителя мощностью до 1000W (вдруг пригодится).
Жду Ваши комментарии и мысли по поводу моих приблизительных расчетов нагрузки БП, да и блока управления в целом. | |||
| Просмотров: 5400 | Комментарии: 6 | | | |||






| Всего комментариев: 6 | ||||
| ||||


|
Железо [6]
Информация по направляющим, ШВП, муфтам и т.д.
|
|
Электроника [4]
Информация по драйверам ШД, платам согласования, БП и т.д.
|
|
Программное обеспечение [1]
Информация по программам для станков с ЧПУ.
|
| Общая информация [2] |
|
Расходные материалы [1]
Фрезы, сверла, граверы. Как пользоваться, обслуживать.
|